在进行**率矩阵抓取时,这是我们常遇见的一个问题:柔爪抓取角度不一致!

解决办法:
如果需要改变柔爪的抓取方向,可以通过调整连接模块的角度来实现。根据需要,适当调整连接模块的角度,使柔爪在特定方向上进行抓取。这不,我们的工程师连夜研发了这个配件CM-RS18。

产品描述:
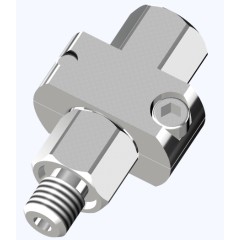
CM-RS18 是用于连接柔爪与连接模块的工件,可适配多款连接模块CM:CM-RM525M5、CM-RM558M5、CM-S04CM-S05、CM-S06、CM-S07,在工作时通过调节旋转接头一侧的螺丝锁紧或放松旋转接头,当旋转接头放松时,Z轴方向的旋转自由度被解锁,可调节旋转角度。当旋转接头锁紧时,Z轴方向的旋转自由度被锁定,便不可调节旋转角度。
