
1,可以根据作业范围大小的不同从标准型、短臂型、长臂型中选择合适的机型。
2,通过采用具有高刚性的手臂和**的伺服控制技术,提高了加减速性能。从而缩短了搬运时间,提高了生产效率。
3,纤细的机身缩小了关节的宽度以及干涉半径,可与工件,治具,周边设备更紧密的设置。
4,可置地式,壁挂式,吊装式摆放。
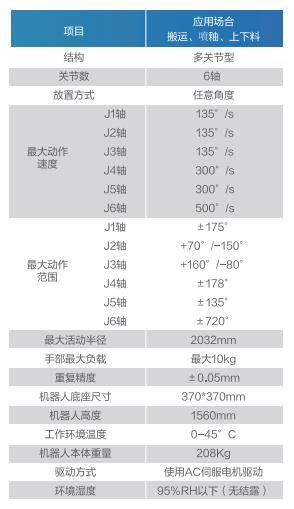
二,工博士机器人GBS10—K2032产品性能参数
三,工博士机器人GBS10—K2032产品运动范围图
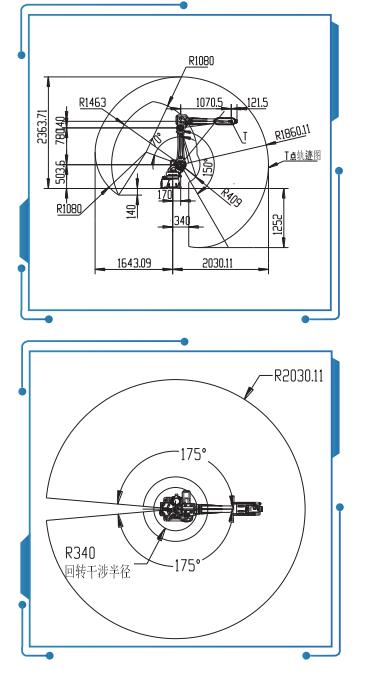
四,工博士机器人GBS10—K2032产品外观及尺寸

三,工博士机器人GBS10—K2032产品运动范围图
四,工博士机器人GBS10—K2032产品外观及尺寸
详情请点击:工博士机器人服务集成