工业机器人
工博士高精度工业机器人GBS10―K1650 臂展1650mm 负载10KG 轴数6
2023-01-31 09:02
134
次点击
品牌 :
工博士
臂展 :
1650mm
最大负载 :
10KG
轴数 :
6
咨询
发送询价
一,
工博士机器人
GBS10—K1650产品特点
1、可以根据作业范围大小的不同从标准型、短臂型、长臂型中选择合适的机型。
2、通过采用具有高刚性的手臂和**的何服控制技术,提高了加减速性能,从而缩短了搬运时间,提高了生产效率。
3、纤细的机身缩小了关节的宽度以及干涉半径,可与工件,治具,周边设备更紧密的设置。
4、可置地式,壁挂式,吊装式摆放。
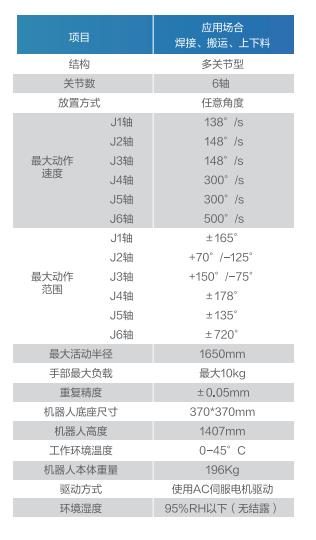
二,工博士机器人GBS10—K1650性能参数图
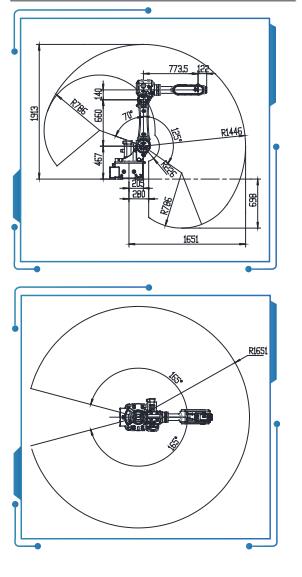
三、工博士机器人GBS10—K1650运动范围图
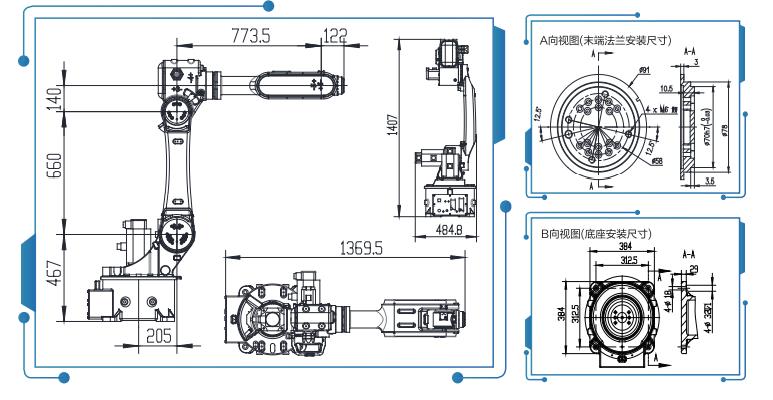
四、工博士机器人GBS10—K1650外观及尺寸
详情请点击:
工博士机器人服务集成
联系方式
公司:
工博士管线包服务商
发信:
点此发送
姓名:谢开欢(先生)
电话:
18616568600
咨询
手机:
18616568600
咨询
地址:上海市宝山区富联一路98弄6号
邮件:xkh@gongboshi.com