产品特点:
01. 冗余度机器人运动学/动力学算法
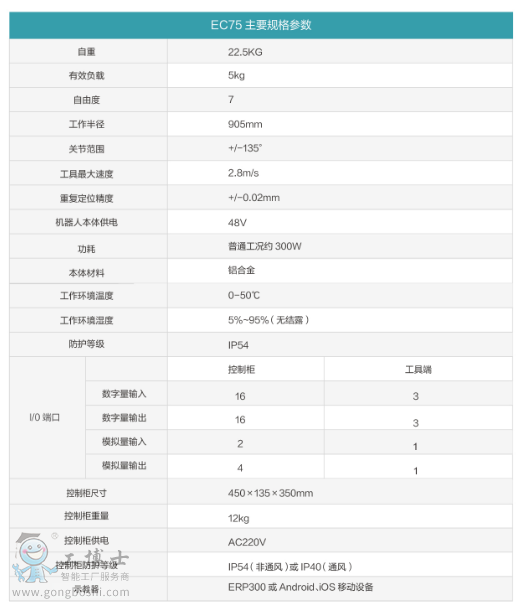
EC75是一款冗余度7轴机器人,与6轴以下艾利特机器人相比可实现更灵活复杂的位姿、位形控制,与人的手臂具有相同灵活度。艾利特的7轴运动学算法,与单 纯的基于位置和笛卡尔坐标系的6轴算法完全不同,而是基于速度/加速度的雅克比矩阵/范数*优解方法,可以通过制定合理的优化函数/权函数来实现针对效率、能量、安全性、柔顺性、避障等高阶需求的综合求解。
02. 0空间/位姿位形双模逆解算法
0空间指保持末端位姿不变、只改变艾利特机器人位形,是只有冗余度机器人才具有的特殊坐标系空间,在拟人规划等应用中有重要意义, 是位姿/位形双模逆解算法的基础。位姿/位形双模逆解算法可以同时满足位姿和位形的混合要求,通过该算法可以完全模拟人手臂的动作,并且相比人手臂可以实现更准确、更高效的运动轨迹
03. 安全/效率双模式
EC75作为一款协作机器人,在追求安全性、智能化的前提下,为适应市场的需求引入安全/效率两种运动模式,在安全模式中以安全优先,对整机的力、速度、加速度、动量、能量等关键物理量进行限制,从而控制碰撞发生时的危害性;而效率模式将完全发挥ERJ系列关节模块扭矩大、速度高的优点,可以提供大于2.8m/s的*大工具线速度,接近传统工业机器人的效率,明显优于国外产品。
04. APP示教体系
使用通用商业移动端设备,如智能手机、PAD等,代替传统的有线专用示教器,是机器人行业长久以来的愿望,也是未来的发展趋势。基于EC75的主动/被动安全特性,以及潜心研究的无线操作安全体系,艾利特将此技术实用化。EC75的示教APP可运行于Android和iOS平台,可完全实现传统示教器的所有功能,并还将提供远程遥控、在线视频协助等多项辅助功能。
05. AR示教体系
在APP示教的基础上,艾利特与AR设备厂商合作,率先在商业化机器人产品中应用AR示教技术。通过运行于AR设备上的APP及摄像头、手势识别等接口进一步提高示教效率。
产品详情:
01. 冗余度机器人运动学/动力学算法
EC75是一款冗余度7轴机器人,与6轴以下艾利特机器人相比可实现更灵活复杂的位姿、位形控制,与人的手臂具有相同灵活度。艾利特的7轴运动学算法,与单 纯的基于位置和笛卡尔坐标系的6轴算法完全不同,而是基于速度/加速度的雅克比矩阵/范数*优解方法,可以通过制定合理的优化函数/权函数来实现针对效率、能量、安全性、柔顺性、避障等高阶需求的综合求解。
02. 0空间/位姿位形双模逆解算法
0空间指保持末端位姿不变、只改变艾利特机器人位形,是只有冗余度机器人才具有的特殊坐标系空间,在拟人规划等应用中有重要意义, 是位姿/位形双模逆解算法的基础。位姿/位形双模逆解算法可以同时满足位姿和位形的混合要求,通过该算法可以完全模拟人手臂的动作,并且相比人手臂可以实现更准确、更高效的运动轨迹
03. 安全/效率双模式
EC75作为一款协作机器人,在追求安全性、智能化的前提下,为适应市场的需求引入安全/效率两种运动模式,在安全模式中以安全优先,对整机的力、速度、加速度、动量、能量等关键物理量进行限制,从而控制碰撞发生时的危害性;而效率模式将完全发挥ERJ系列关节模块扭矩大、速度高的优点,可以提供大于2.8m/s的*大工具线速度,接近传统工业机器人的效率,明显优于国外产品。
04. APP示教体系
使用通用商业移动端设备,如智能手机、PAD等,代替传统的有线专用示教器,是机器人行业长久以来的愿望,也是未来的发展趋势。基于EC75的主动/被动安全特性,以及潜心研究的无线操作安全体系,艾利特将此技术实用化。EC75的示教APP可运行于Android和iOS平台,可完全实现传统示教器的所有功能,并还将提供远程遥控、在线视频协助等多项辅助功能。
05. AR示教体系
在APP示教的基础上,艾利特与AR设备厂商合作,率先在商业化机器人产品中应用AR示教技术。通过运行于AR设备上的APP及摄像头、手势识别等接口进一步提高示教效率。
产品详情: