
 产品介绍
产品特点
产品介绍
产品特点
小巧、强劲、快速
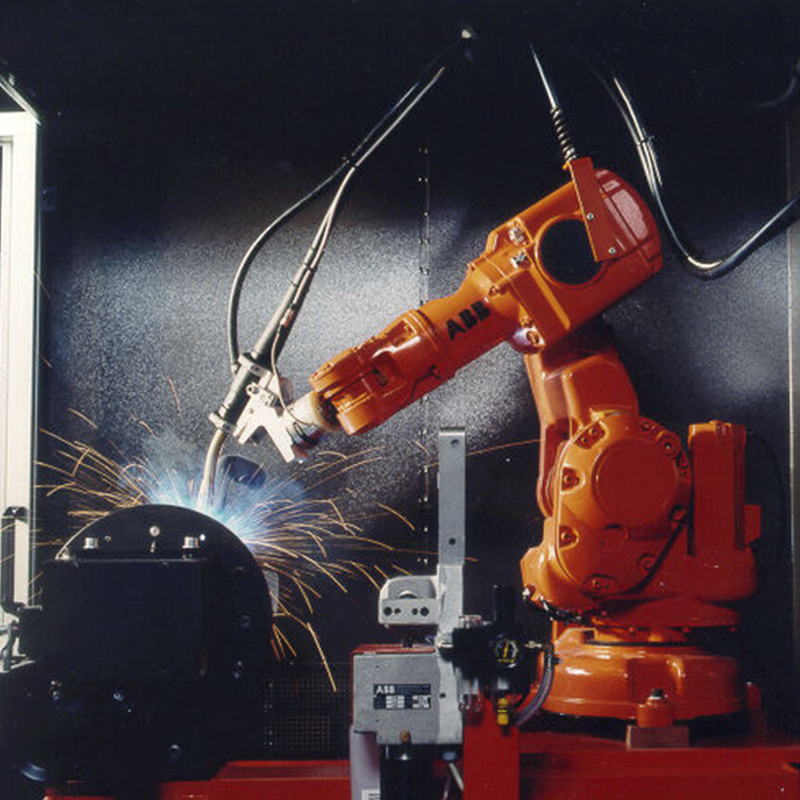
外形紧凑,功能强劲的IRB 140是一款六轴多用途工业机器人,有效荷重6kg,工作范围长达810mm,可选落地安装、倒置安装或任意角度挂壁安装方式。IRB 140分标准型、铸造专家型、洁净室型、可冲洗型4种机型,所有机械臂均全面达到IP67防护等级,易于同各类工艺应用相集成与融合。IRB 140上臂采用后反转机构,即使采用挂壁安装,轴1仍可以旋转360°,工作半径显著扩大。
IRB 140设计紧凑、牢靠,采用集成式线缆包,进一步提高了整体柔性。可选配碰撞检测功能(实现全路径回退),使可靠性和安全性更有保障。
IRB140T以轴1、轴2作业为主,大幅度缩短节拍时间。
在仅使用轴1、轴2的场合下,节拍时间可缩短百分之15-20,该款告诉型产品配套PickMaster是包装作业和引导式作业的理想之选。
IRB铸造专家型和可冲洗型适合在铸造环境及其他对抗腐蚀性和密封性要求严苛的恶劣环境中使用。两种机型均达到IP67防护等级,并经高标准表面处理,耐高压蒸汽清洗。白色涂装的洁净室型机器人则达到10级洁净室标准,尤其适合对洁净度有严格要求的生产环境。
产品图片


技术参数
|
规格 |
|||
|
机器人型号 |
荷重能力 |
第五轴工作范围 |
注释 |
|
IRB 140/IRB 140T |
6kg |
810mm |
|
|
IRB 140F/IRB 140TF |
6kg |
810mm |
铸造专家型防护 |
|
IRB 140CR |
|||
|
IRB 140TCR |
6kg |
810mm |
洁净室型 |
|
IRB 140W |
|||
|
IRB 140TW |
6kg |
810mm |
可冲洗型防护 |
|
附加荷重(上臂或手腕) |
|||
|
上臂 |
1kg |
||
|
手腕 |
0.5kg |
||
|
轴数 |
|||
|
机器人本体 |
6 |
||
|
外轴设备 |
6 |
||
|
集成信号源 |
上臂12路信号 |
||
|
集成气源 |
上臂8bar |
||
|
性能 |
|||
|
重复定位精度 |
0.03mm(ISO实验平均值) |
||
|
轴动作 |
轴 |
工作范围 |
|
|
1.C旋转 |
360° |
||
|
2.B手臂 |
200° |
||
|
3.A手臂 |
280° |
||
|
4.D手腕 |
无限制(默认400°) |
||
|
5.E弯曲 |
240° |
||
|
6.P反转 |
无限制(默认800°) |
||
|
TCP速度 |
2.5m/s |
||
|
TCP加速度 |
20m/S |
||
|
加速时间0-1m/s |
0.15s |
||
|
速度 |
|||
|
轴号 |
IRB 140 |
IRB 140T |
|
|
1 |
200°/s |
250°/s |
|
|
2 |
200°/s |
250°/s |
|
|
3 |
260°/s |
260°/s |
|
|
4 |
360°/s |
360°/s |
|
|
5 |
360°/s |
360°/s |
|
|
6 |
450°/s |
450°/s |
|
|
节拍时间 |
|||
|
5kg拾料侧 |
IRB 140 |
IRB140 T |
|
|
节拍25*300*25mm |
0.85s |
0.77s |
|
|
电气连接 |
|||
|
电源电压 |
200-600V,50/60Hz |
||
|
额定功率 |
|||
|
变压器额定值 |
4.5kVA |
||
|
典型功耗 |
0.4kW |
||
|
物理特性 |
|||
|
机器人安装 |
任意角度 |
||
|
尺寸 |
|||
|
机器人底座 |
400*450mm |
||
|
机器人控制器(高*宽*深) |
950*800*620mm |
||
|
重量 |
|||
|
机器人本体 |
98kg |
||
|
环境 |
|||
|
环境温度 |
|||
|
机器人本体 |
5-45℃ |
||
|
相对湿度 |
百分之95 |
||
|
防护等级 |
|||
|
机器人本体 |
IP67 |
||
|
选件 |
铸造型 |
||
|
可冲洗型(耐高压蒸汽清洗) |
|||
|
洁净室型,6级(IPA认证) |
|||
|
噪音水平 |
70dB(A) |
||
|
安全 |
带监控、紧急停和保障功能的双回路 |
||
|
|
3位启动装置 |
||
|
辐射 |
EMC/EMI屏蔽 |
||
更多资讯:ABB机器人