
机器人基本轴及回传半径设计纤细化,避免了与夹具、工件的干涉;
synchro-feed焊接配置所需要的电缆均藏于机身,避免了手臂后方的干涉;
可搬运重量提高30%达到8kg,可轻松搭载各种焊枪及传感动器,同时非常适合于搬运用途。
| 型号 | FD-V8 | |
| 轴数 | 6轴 | |
| 负载 | 8kg | |
| 重复定位精度 | ±0.08mm | |
| 驱动容量 | 3016w | |
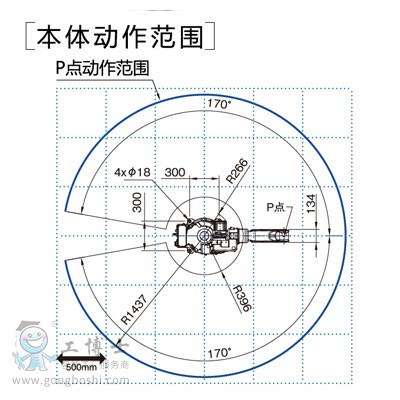
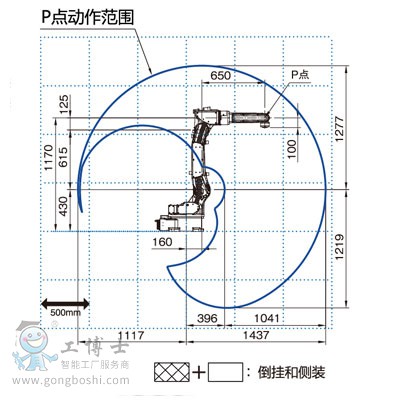
| 动作范围 | 基本轴J1 | ±170°(±50°) |
| 基本轴J2 | 155°~90° | |
| 基本轴J3 | 170°~190° | |
| 手臂轴J4 | ±180° | |
| 手臂轴J5 | 50°~230° | |
| 手臂轴J6 | ±360° | |
| *大速度 | 基本轴J1 | 4.19rad/s{240°/s}(3.32rad/s{190°/s}) |
| 基本轴J2 | 4.19rad/s{240°/s} | |
| 基本轴J3 | 4.01rad/s{230°/s} | |
| 手臂轴J4 | 7.50rad/s{430°/s} | |
| 手臂轴J5 | 7.50rad/s{430°/s} | |
| 手臂轴J6 | 11.00rad/s{630°/s} | |
| 荷载能力 | 允许扭矩 J4 | 17.6N·m |
| 允许扭矩 J5 | 17.6N·m | |
| 允许扭矩 J6 | 7.8N·m | |
| 允许惯性矩 J4 | 0.43kg·m² | |
| 允许惯性矩 J5 | 0.43kg·m² | |
| 允许惯性矩 J6 | 0.09kg·m² | |
| 机器人动作范围截面面积 | 3.11m²x340° | |
| 周围温度·湿度 | 0~45℃,20~80%RH(无结露) | |
| 本体重量 | 140kg | |
| 上部手臂可载重量 | 10kg | |
| 安装方式 | 正装、倒挂、侧装 | |