




-

工博士气动夹具 两指平动式夹爪GBS-04-P-40A-1-TEM机器人夹具--工博士工业机器人
- 型号:GBS-04-P-40A-1-TEM
- 夹持力/N:123/132
 300
300

-

工博士气动夹具 两指平动式夹爪GBS-04-P-40A-1-IS-SD机器人夹具-工博士工业机器人
- 型号:GBS-04-P-40A-1-IS-SD
- 夹持力/N:182
276
-

工博士气动夹具 两指平动式夹爪GBS-04-P-40A-1-AS-SD机器人夹具-工博士工业机器人
- 型号:GBS-04-P-40A-1-AS-SD
- 夹持力/N:163
309
-

工博士气动夹具 两指平动式夹爪GBS-04-P-40A-1-IS机器人夹具-工博士工业机器人自主产品
- 型号:GBS-04-P-40A-1-IS
- 夹持力/N:-/182
266
-

工博士气动夹具 两指平动式夹爪GBS-04-P-40A-1-AS机器人夹具-工博士工业机器人自主产品
- 型号:GBS-04-P-40A-1-AS
- 夹持力/N:163
307
-

工博士气动夹具 两指平动式夹爪GBS-04-P-50A-2机器人夹具机械手执行机构-工博士工业机器人
- 类型:GBS-04-P-50A-2
- 夹持力/N:290/310
256
-

工博士气动夹具 两指平动式夹爪GBS-04-P-50A-1机器人夹具机械手执行机构-工博士工业机器人
- 类型:GBS-04-P-50A-1
- 夹持力/N:140/145
231
-

工博士气动夹具 两指平动式夹爪GBS-04-P-40A-1-AS-TEM机器人夹具-工博士工业机器人
- 类型:GBS-04-P-40A-1-AS-TEM
- 夹持力/N:163
222
-
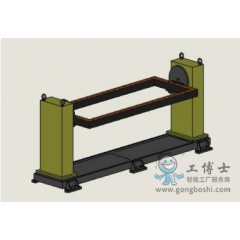
工博士机器人自主产品 焊接版L型变位机: GBS-02-L500/1000/2000焊接机器人变位机
- 类型:焊接版L型变位机
- 型号:GBS-02-L500/1000/2000
234
-
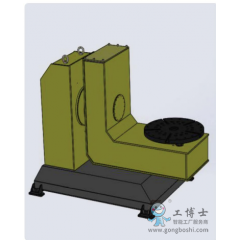
工博士工业机器人自主产品 铸造版U型变位机: GBS-02-U300/500-F机器人变位机
- 类型:U型变位机
- 型号:GBS-02-U300/500-F
211
-

工博士气动夹具 GBS-04-P-50A-1-IS机器人夹具机械手执行机构-工博士工业机器人自主产品
- 型号:GBS-04-P-50A-1-IS
- 夹持力/N:-/190
307
-

工博士气动夹具 GBS-04-P-50A-2-AS机器人夹具机械手执行机构-工博士工业机器人自主产品
- 型号:GBS-04-P-50A-2-AS
- 夹持力/N:385
260
-

工博士气动夹具 GBS-04-P-50A-1-AS机器人夹具机械手执行机构-工博士工业机器人自主产品
- 类型:GBS-04-P-50A-1-AS
- 夹持力/N:185
232
-

工博士机器人 焊接版O型单轴水平旋转变位机:GBS-02-0300/500/1000焊接机器人变位机
- 设备净重:200kg
- 类型:焊接版O型单轴水平旋转变位机
- 型号:GBS-02-0300/500/1000
213
-
工博士机器人自主产品 焊接版H型单轴变位机:GBS-02-H300/500/1000焊接机器人变位机
- 类型:焊接版H型单轴变位机
- 型号:GBS-02-H300/500/1000
221
-

工博士机器人自主产品 焊接版U型变位机:GBS-02-U1000/3000/5000焊接机器人变位机
- 类型:焊接版U型变位机
- 型号:GBS-02-U1000/3000/5000
237
-

GBS-05-ABB-A1A4|机器人防护服|工博士防护服|工博士机器人防护服|工业机器人防护服
- 机器人品牌:ABB
235
-
工博士工业机器人自主产品 机器人吸盘 真空吸盘-异形吸盘(吸盘+夹具)-机器人真空吸盘系统
- 产品:机器人真空吸盘
300
-

工博士气动夹具 GBS-04-P-50A-2-IS机器人夹具机械手执行机构-工博士工业机器人自主产品
- 型号:GBS-04-P-50A-2-IS
- 夹持力/N:-/405
266
-
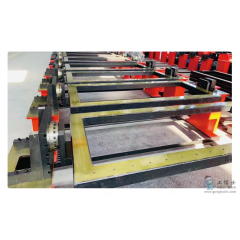
工博士机器人自主产品GBS-01-W1500型 机器人第七轴机器人导轨(焊接版)行走轨道-机器人配件
- 负载:1500kg
250
